mini-R, robot-rover basato sull'ESP8266
mini-R
mini-R è un robot-rover controllato via Wi-Fi costruito attorno al kit Adafruit Mini Robot Rover Chassis.
I codici completi per il controllo del robot e per l’interfaccia web sono disponibili nella repository del progetto su GitHub.

Al centro del progetto si trova un Adafruit ESP8266 Feather Huzzah impostato in modalità soft-AP e controllato tramite una web-app. Il driver dei motori è la scheda Adafruit DC Motor + Stepper FeatherWing.
mini-R funziona senza collegamento a Internet: il robot crea la propria rete Wi-Fi attraverso la quale avviene il collegamento alla web-app per controllarne i movimenti.

Assemblaggio
Motori e ruote
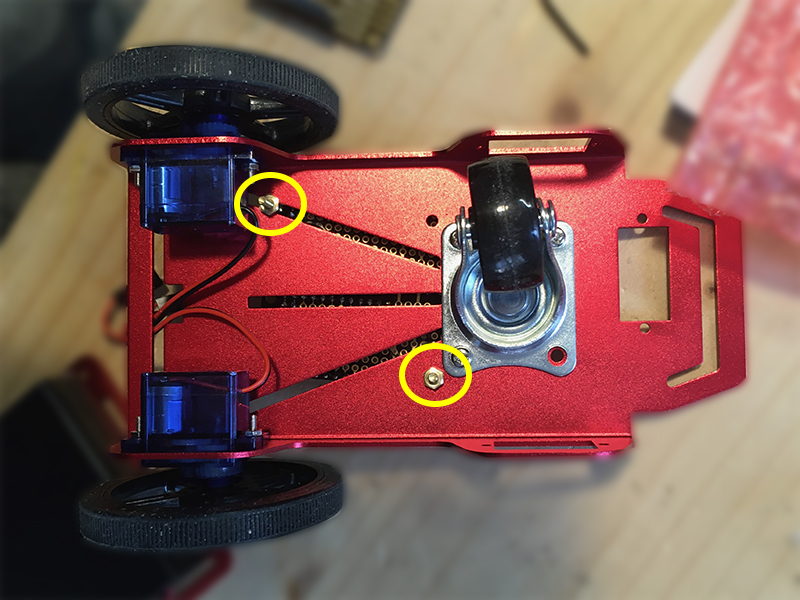
Per prima cosa vanno montati i due motori facendo attenzione a posizionarli verso l’interno dello chassis (vedi Figura.1). A questo punto avvitare le ruote posteriori ai montari e utilizzare quattro bulloni per posizionare la ruota centrale, avvitandoli dal basso (vedi Figura.1).

FeatherWing Doubler
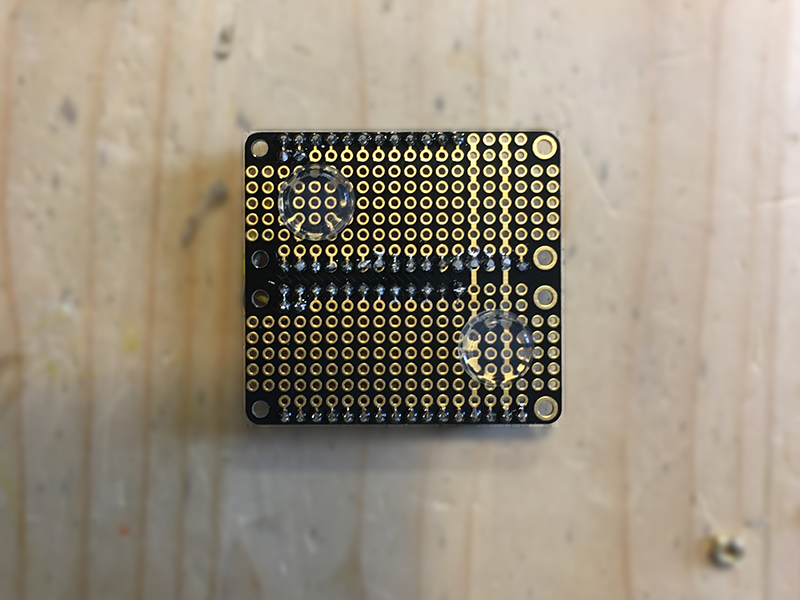
Applicare due distanziatori in silicone sotto al FeatherWing Doubler come in Figura.2.
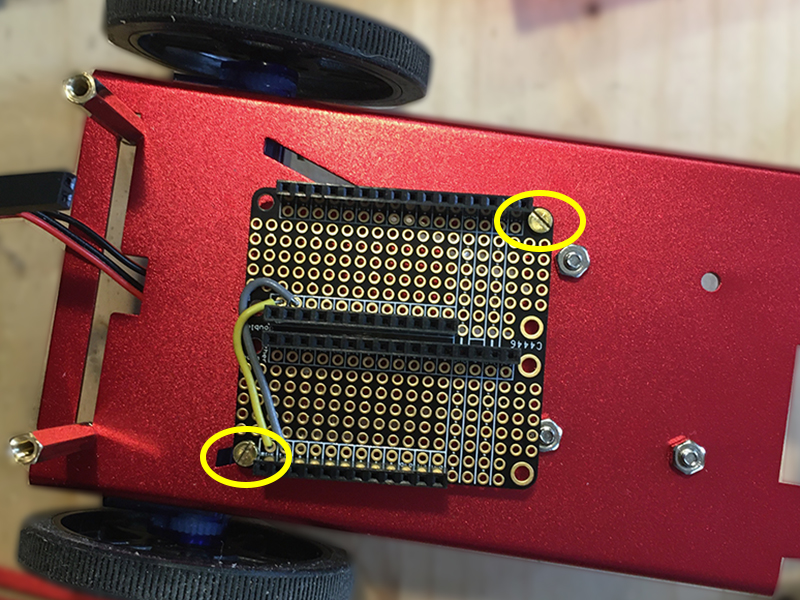
Avvitare il FeatherWing Doubler allo chassis sfruttando un taglio diagonale esterno e un foro della base del robot, avvitando prima il bullone in alto a sinistra in Figura.3 facendolo scorrere verso il centro per facilitare l’avvitatura, poi quello in basso a destra posizionandolo nel foro predisposto (vedi Figura.3).
Visto dall’alto in posizione corretta il FeatherWing Doubler deve risultare posizionato come in Figura.4.
ESP8266 e driver motori
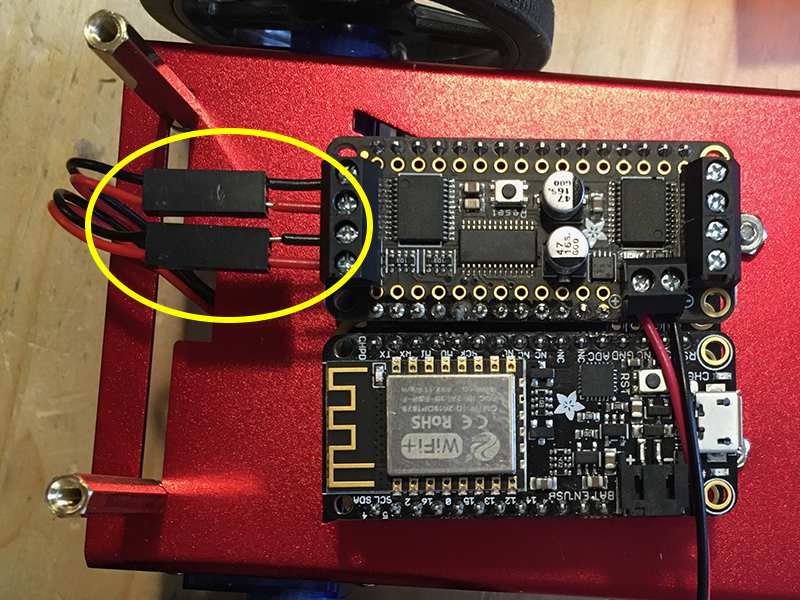
Sul Feather doubler vanno posizionate le due schede, l'Adafruit ESP8266 Feather Huzzah e l'Adafruit DC Motor, il primo sulla destra e il secondo sulla sinistra, come in Figura.5, facendo attenzione all’orientazione dei connettori.

Connettere il portabatterie da quattro batterie stilo da 1.5V al driver dei motori facendo attenzione alla polarità (cavo rosso connesso al + e cavo nero al -), vedi Figura.6.

Connettere i motori al driver motori con attenzione alla polarità, il motore di sinistra va connesso ai connettori di sinistra e viceversa quello di destra.
Posizionare le batterie
Avvitare i distanziali allo chassis e montare la piastra superiore come in Figura.8, fissare il portabatterie alla piastra con del nastro biadesivo e connettere la batteria al litio all’ESP8266
Controllare il robot-rover mini-R
Il rover ospita un server web che crea un’interfaccia per controllare i movimenti di mini-R.
La web-app è scritta in HTML5/CSSe si basa sulla WebSocket API.
L’applicazione è scritta in vanilla-JavaScript in modo tale che il codice possa girare senza aver bisogno di librerie esterne che necessitino di connessione a Internet per essere scaricate: per controllare il robot basta collegarsi con un web browser all’indirizzo 192.168.4.1.